Projekte
Projekte, die Ihr Ziel erreichen
flexible Bin Picking Applikation für zwei Werkstücke
-
Entnahme aus Kiste mit Einzelgreifer
-
Ev. Zwischenscannung
-
Ablage in Mehrfachzwischendepot
-
Spannen in Mehrfachgreifer
-
Bearbeitung in Maschine
-
Prüfung, Abwurf
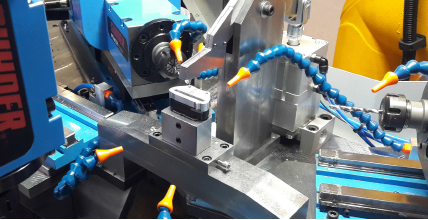
Beschickung von zwei Fräszentren aus Ladenmagazin mit Teileprüfung
-
Laserabstandsgesteuerte Entnahme aus Magazinlade mit 3-fach Greifer
-
Bearbeitung in zwei 4-Achs Fräszentren
-
Entnahme und Prüfung der Teile
-
Evtl. Rückgri auf Schwesternwerkzeug in Maschine (noch
nicht realisiert)
-
Abwurf in Gut- oder Schlechtteil
-
gesamte Bedienung über Control-Panel des Roboters bzw
Klein SPS

Sondermaschine für Bergsport-Artikel Hersteller in Fulpmes
-
Zuführung über Schüttgutbunker
-
Vereinzelung über Rüttelmechanismus
-
Optische Lagedetektion
-
Gri mitRoboterundEntlegenRohteilundEntnahmeFertigteil
mit Wechselgreifer
-
Bearbeitung in Sondermaschine mit 6 angetriebenen Linea-
rachsen über Bohr und Frässpindeln
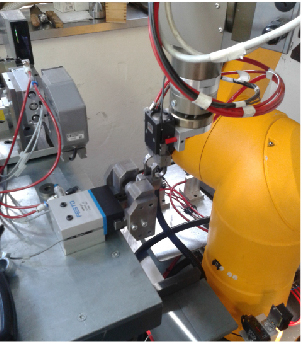
Bin Picking Applikation mit Teileprüfung bzw. -messung
-
Entnahme aus Kiste mit Einfachgreifer durch 6 +2 -Achs-Roboter
-
Abwurf auf Zwischenablage falls notwendig
-
Testklemmung und Umgreifen in Einlegeposition des Werkstückes
-
Bearbeitung in Dreh-Fräs-Zentrum
-
Messung in 2-Achs-Messanordnung
-
Abwurf in Gut- oder Schlechtteil-Kiste
-
Bedienung über Windows-Ober äche